Giusy Falcone, PhD
Postdoctoral Fellow
Robotics Institute @CMU
Exciting news! Starting in January 2024, I will be working as a tenure-track assistant professor in the Aerospace Engineering Department at the University of Michigan, Ann-Arbor. Stay tuned for updates on the S-FALCON Lab and available Ph.D. positions!
News
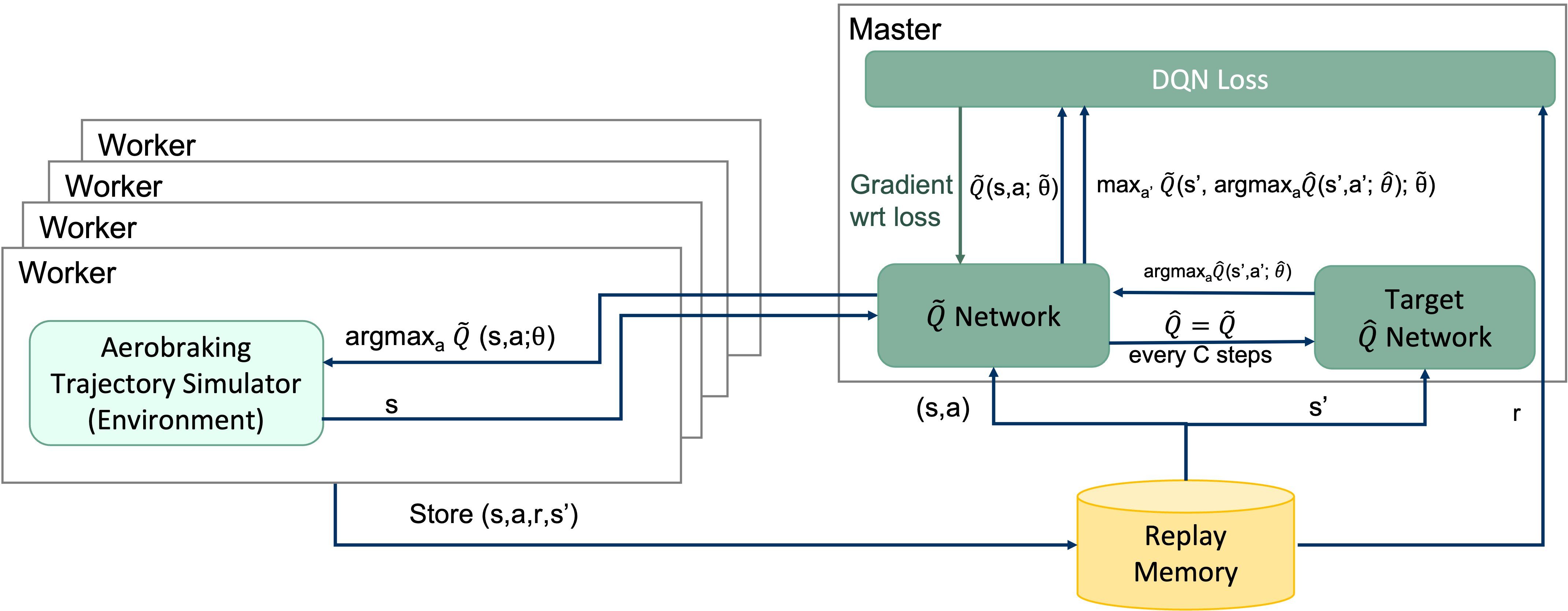
- [2023] Won the 2022 AIAA Intelligent Systems Best Paper Award! "Deep Reinforcement Learning for Autonomous Aerobraking Maneuver Planning".
- [2022] Accepted Paper "Robust Entry Guidance with Atmospheric Adaptation" to the 2023 AIAA SciTech Forum.
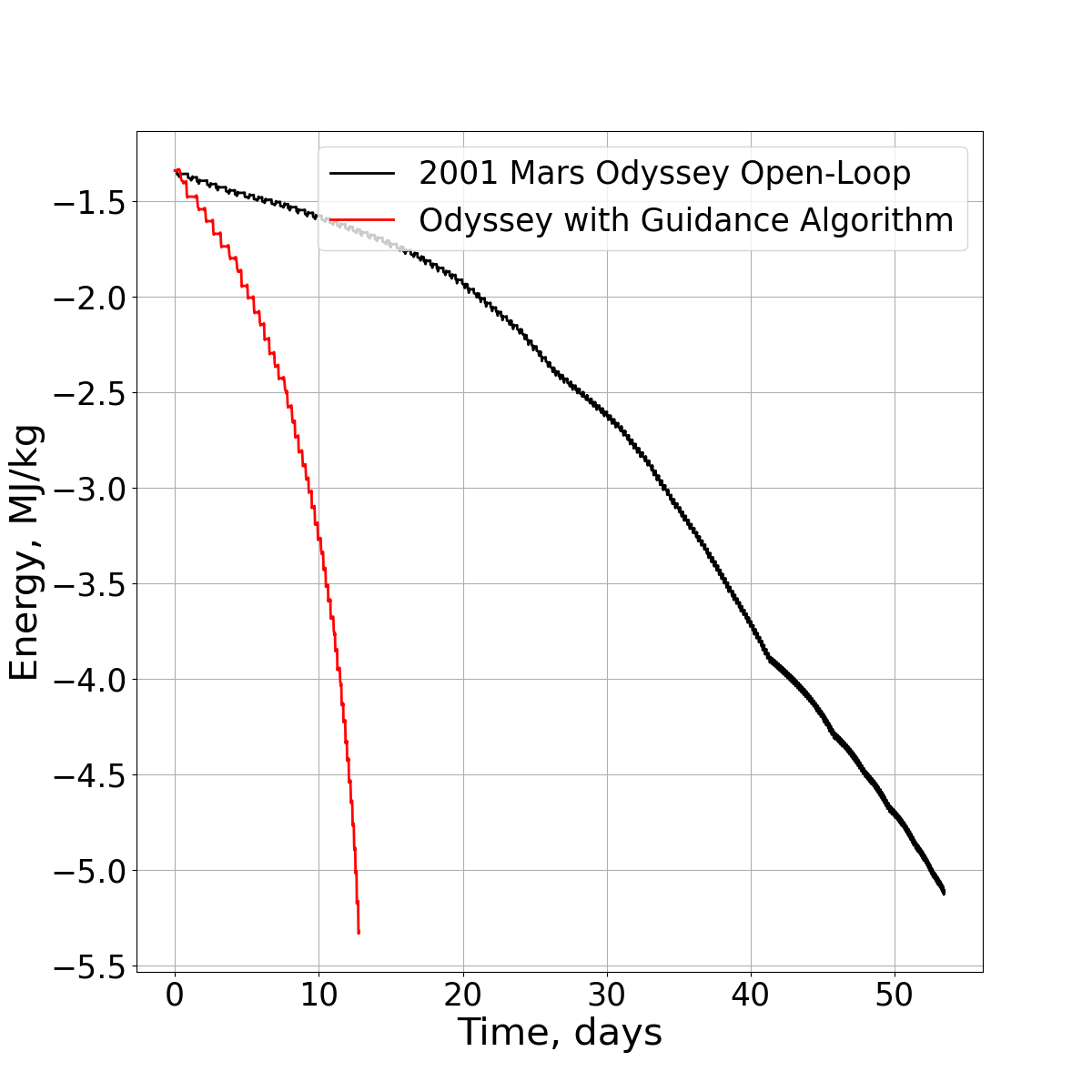
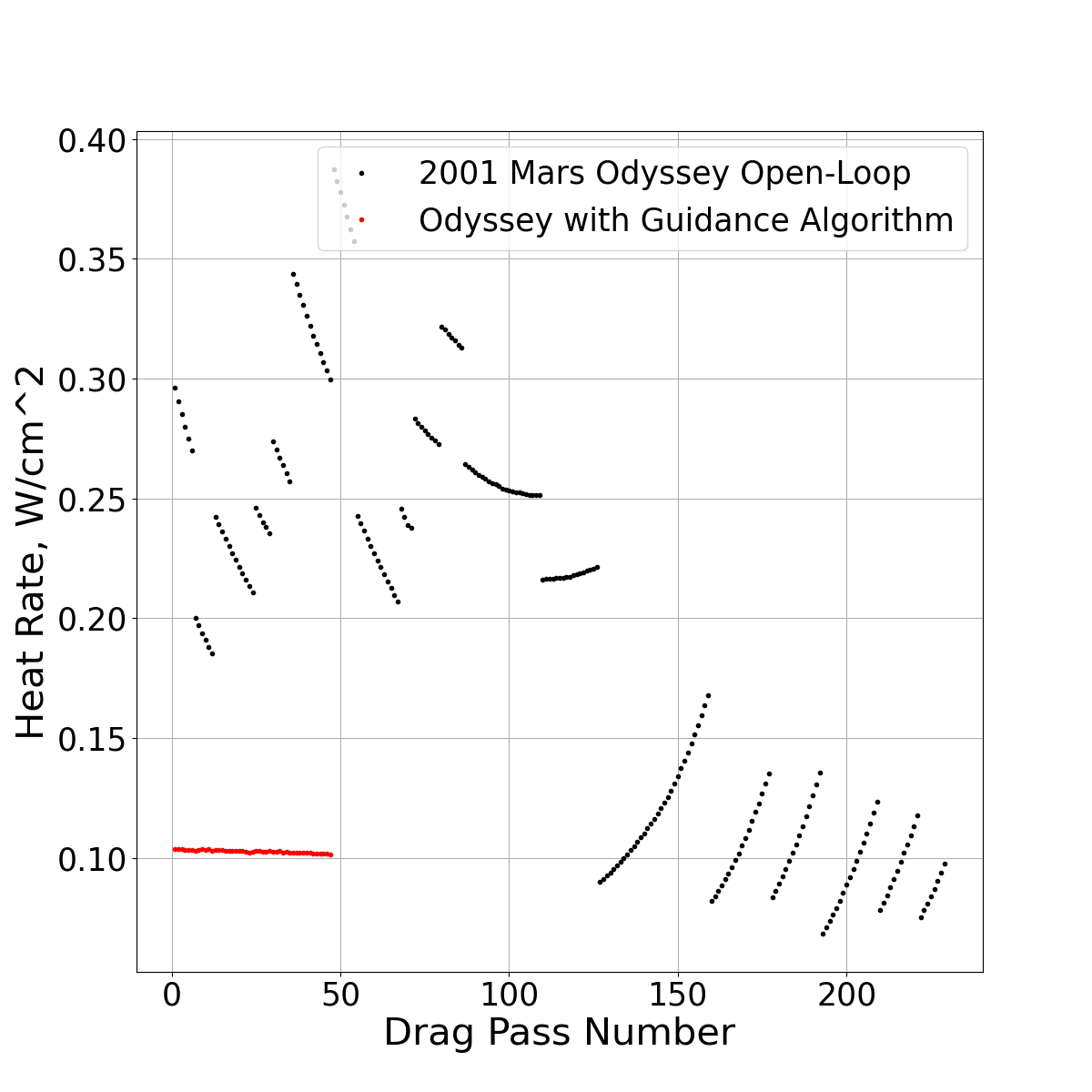
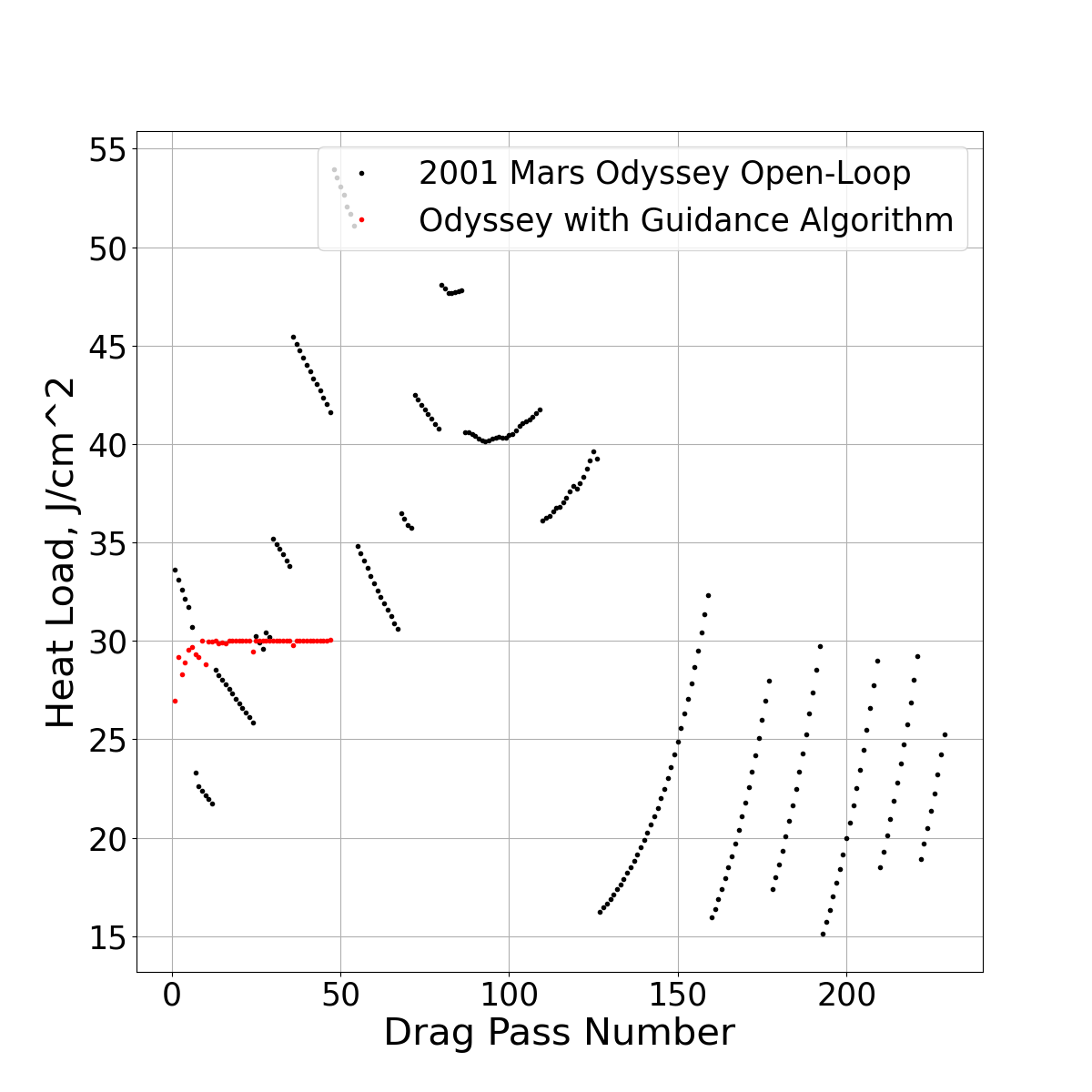
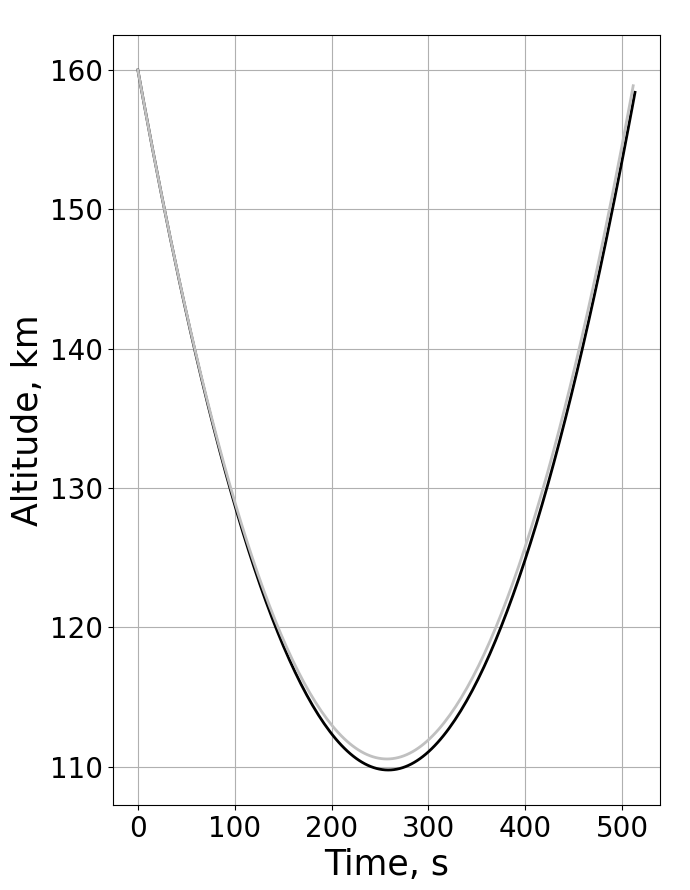
- [2022] Energy Depletion Guidance featured in the NASA Langley Alumni Association newsletter!
- [2022] "Autonomous Decision-Making for Aerobraking via Parallel Randomized Deep Reinforcement Learning" manuscript published by the IEEE Transactions on Aerospace and Electronic Systems!
- [2022] Started new position as Postdoctoral Fellow at REx Lab!
- [2022] Energy Depletion Guidance featured in the 2022 Annual UPDate magazine
- [2022] Obtained my Doctoral Degree from UIUC!
- [2022] Selected for 2022 Rising Stars in Aerospace at CU Boulder!
- [2022] #CallmeDoctor! Passed Final Examination!
- [2022] New version of ABTS released on GitHub!
- [2022] Energy Depletion Guidance featured in the Italian National Institute of Astrophysics newsletter
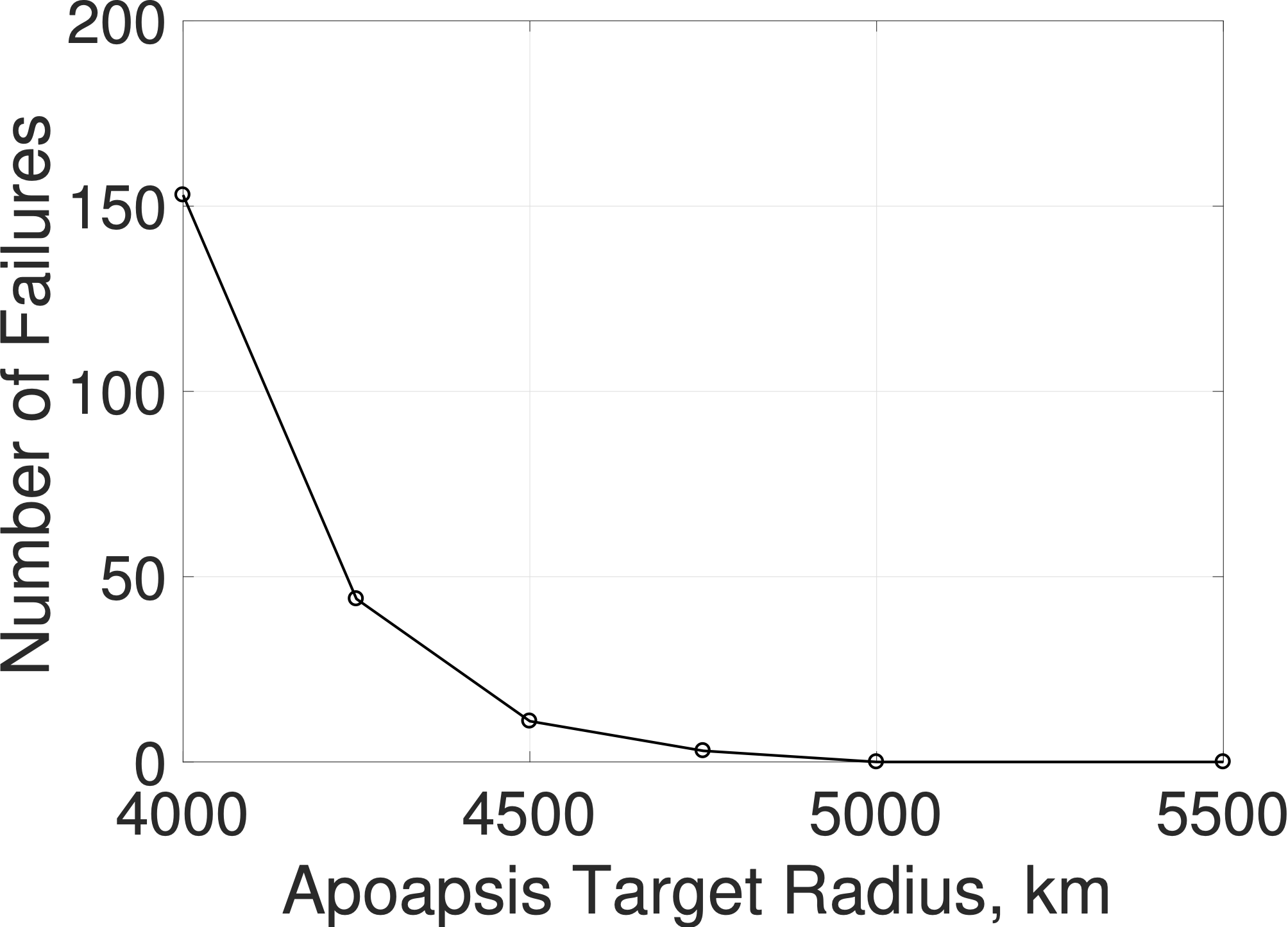
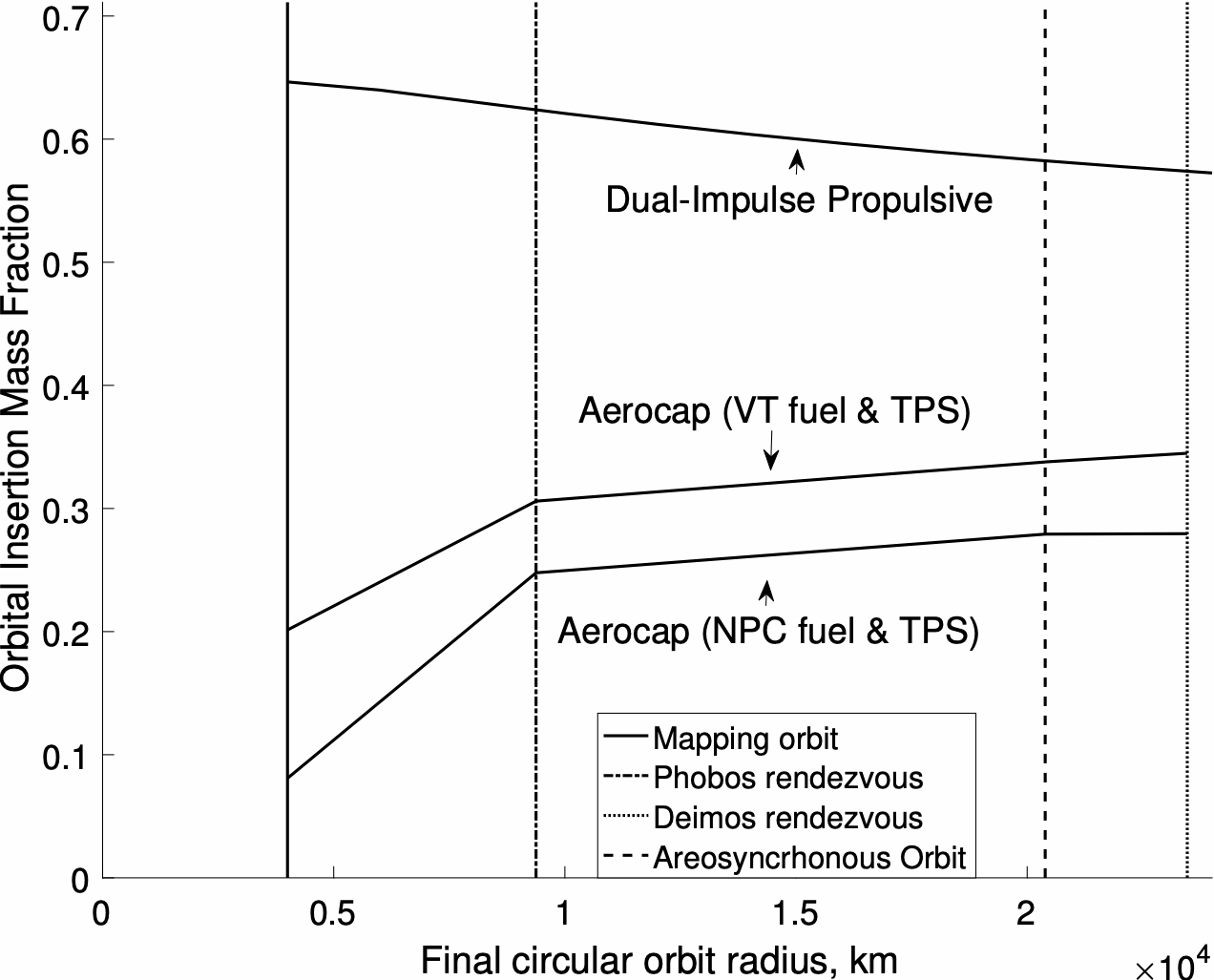
- [2022] Revolutionizing Access to the Martian Surface report is out!
- [2022] Received the Graduate Student Service Award!
- [2022] "Mission Performance Assessment of Multimode Propulsion for Satellite Servicing Applications" presented to the IEEE Aerospace Conference.
- [2022] Appointed to chair for the "Learning, Reasoning, and Data-Driven Systems V" session (2022 AIAA SciTech Forum).
- [2022] Presented Deep Reinforcement Learning for Autonomous Aerobraking Maneuver Planning to the 2022 AIAA SciTech Forum.
- [2021] Accepted Abstract "Deep Reinforcement Learning for Autonomous Aerobraking Maneuver Planning" to the 2022 AIAA SciTech Forum.
- [2021] Accepted Proceeding "Mission Performance Assessment of Multimode Propulsion for Satellite Servicing Applications" to the IEEE Aerospace Conference
- [2021] Participated to Revolutionizing Access to the Martian Surface Workshop II KISS Study by Caltech . Such an incredible experience!
- [2021] "Energy Depletion Guidance for Aerobraking Atmospheric Passes" manuscript accepted by the AIAA Journal of Guidance, Control, and Dynamics!
- [2021] Participated to Revolutionizing Access to the Martian Surface Workshop I KISS Study by Caltech Such an incredible experience
- [2021] Selected to participate in Revolutionizing Access to the Martian Surface KISS Study by Caltech.
- [2021] Relased "Aerobraking Trajectory Simulation Tool (ABTS) " on GitHub.
- [2021] Presented "Design and Development of an Aerobraking Trajectory Simulation Tool " to the 2021 AIAA SciTech Forum.
- [2020] Selected as one of the nine students to represent the University of Illinois in the national competition for the Schmidt Science Fellows Program.
- [2020] Accepted Abstract "Design and Development of an Aerobraking Trajectory Simulation Tool " to the 2021 AIAA SciTech Forum.
- [2020] Received the Robert Beatty Fellowship.
- [2020] Presented "Closed-Form Trajectory Solution for Shallow, High-Altitude Atmospheric Flight" to the 2020 AAS/AIAA Astrodynamics Specialist Conference.
- [2020] Received the AE Alumni Advisory Board Fellowship!
- [2020] Invited as speaker to the "Lightining talks from outstanding young researchers" IPPW2020 Webinar Series
- [2020] #CallmePhDcandidate! Passed Preliminary Examination
- [2019] Received the Mavis Future Faculty Fellowship
- [2019] "Aerobraking Trajectory Control" paper presented at AIAA/AAS Astrodynamics Specialist Conference!
- [2019] "Aerocapture for Small Satellite" published in the Journal of Spacecraft and Rockets!
- [2019] Received Conference Travel Award for Graduate Student
- [2018] "ML for Autonomous Aerobraking" presented at IPPW-15!
- [2018] Received Outstanding Poster Presentation Award at IPPW-15!
- [2018] Received Conference Travel Award for Graduate Student!
- [2018] Received Student Scholarship Awards of IPPW-15!
- [2018] "Aerocapture for Small Satellite" paper presented at AAS Guidance and Control Conference!
- [2018] Ranked "Excellent" Teacher for the Space System Design course!
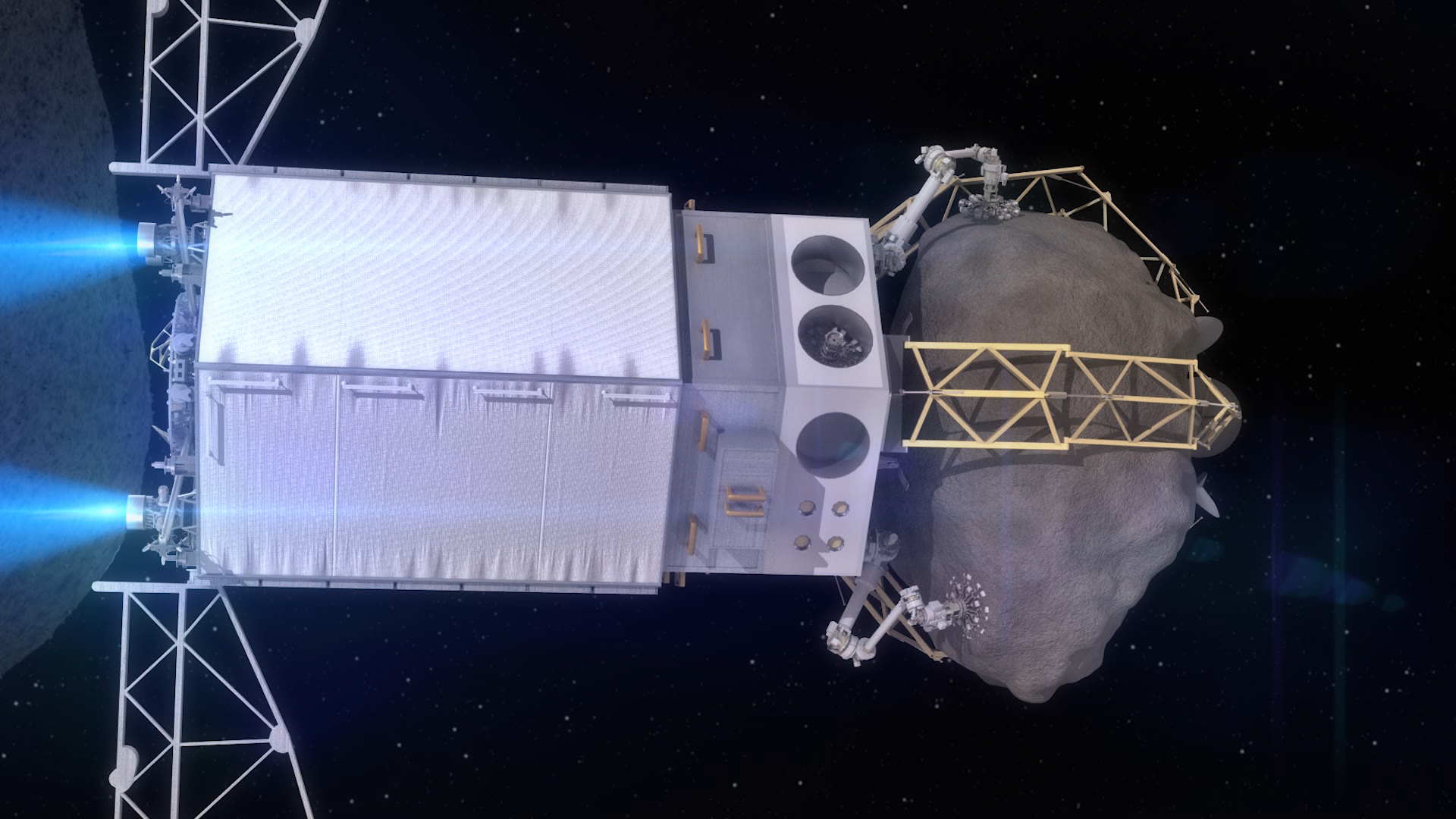
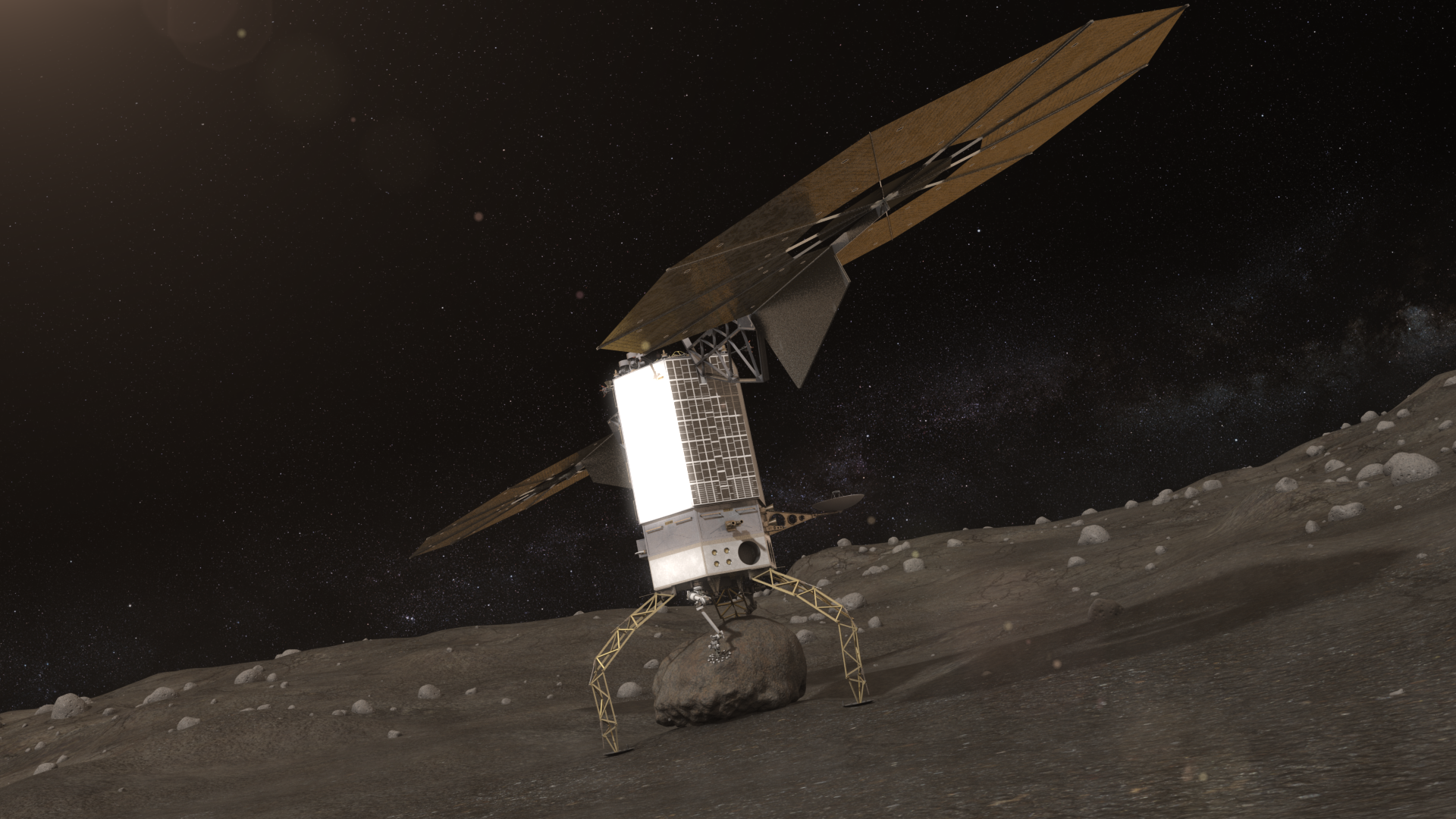
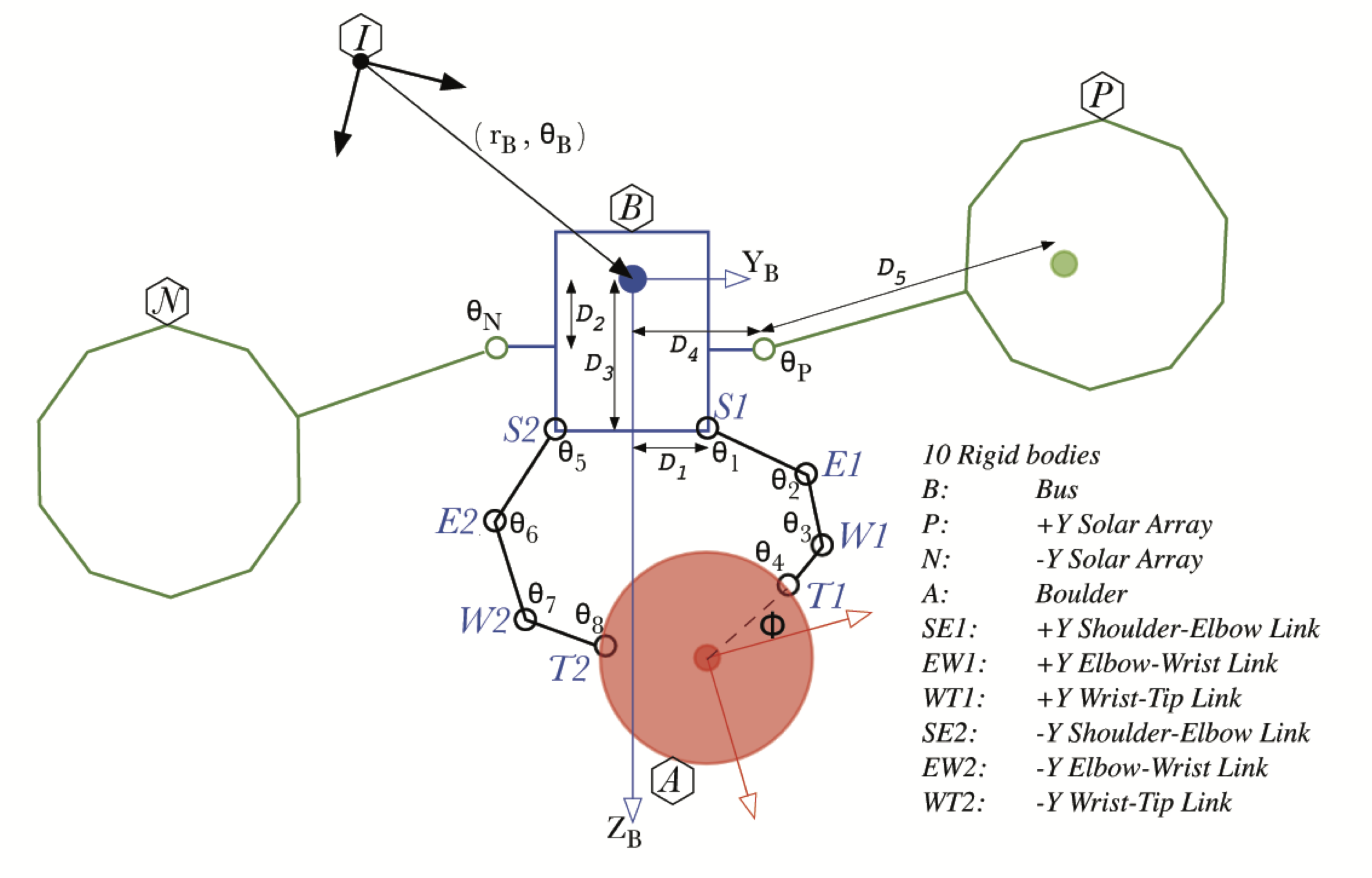
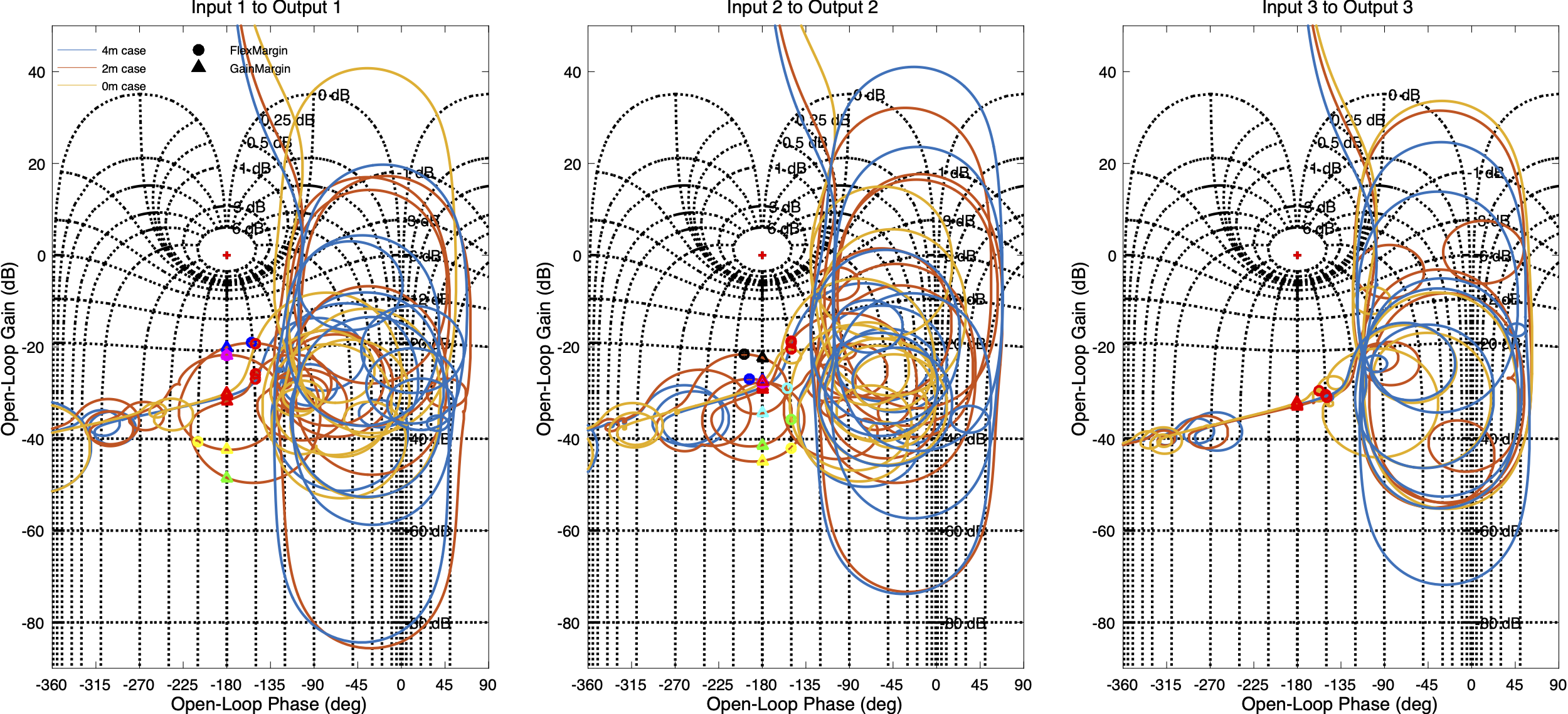
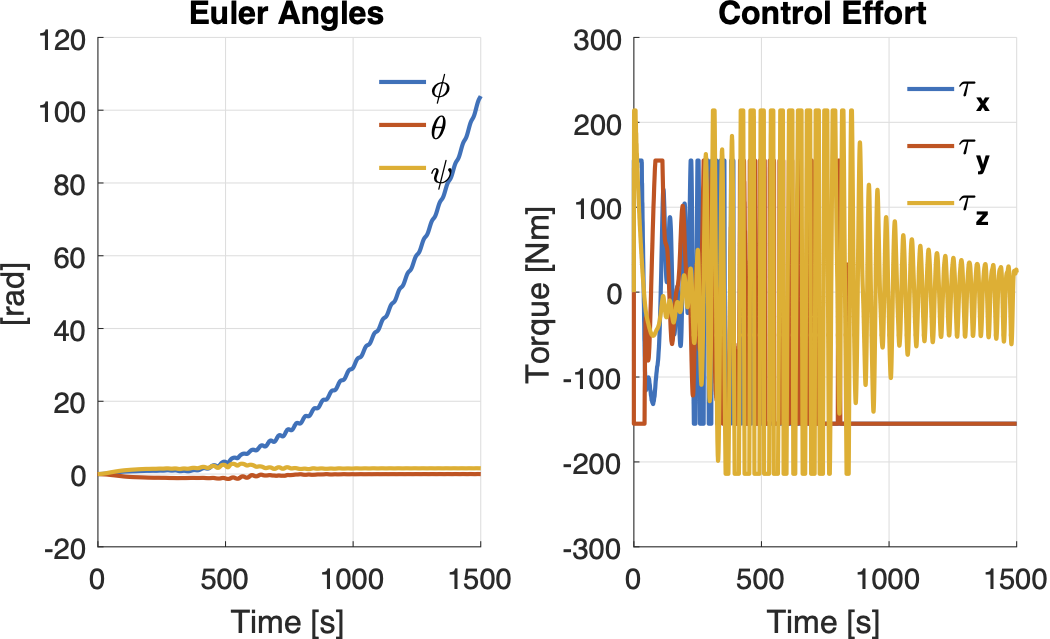
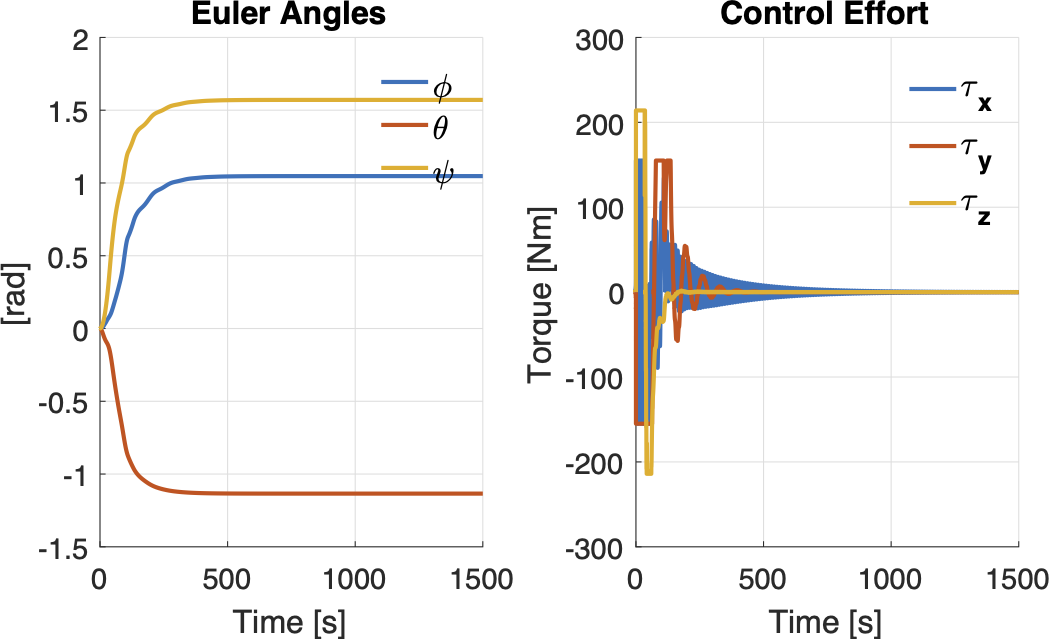
- [2016] "Attitude Control for ARRM" paper accepted and presented to AIAA Space Forum!